One of the descriptions used by the NASA Innovative Advanced Concepts (NIAC) program that has supported our research for the last three years is: “Science Fiction Becoming Science Fact!”

In a fun reversal, our “Science Fact” research has been turned into “Science Fiction” — Neal Stephenson has including rolling Tensegrity Robots modeled off our SUPERball design in his newest book Seveneves: A Novel
For those who do not recognize his name right away, Neal is a world famous science fiction author and wrote influential works such as Snow Crash, The Diamond Age, and Cryptonomicon.
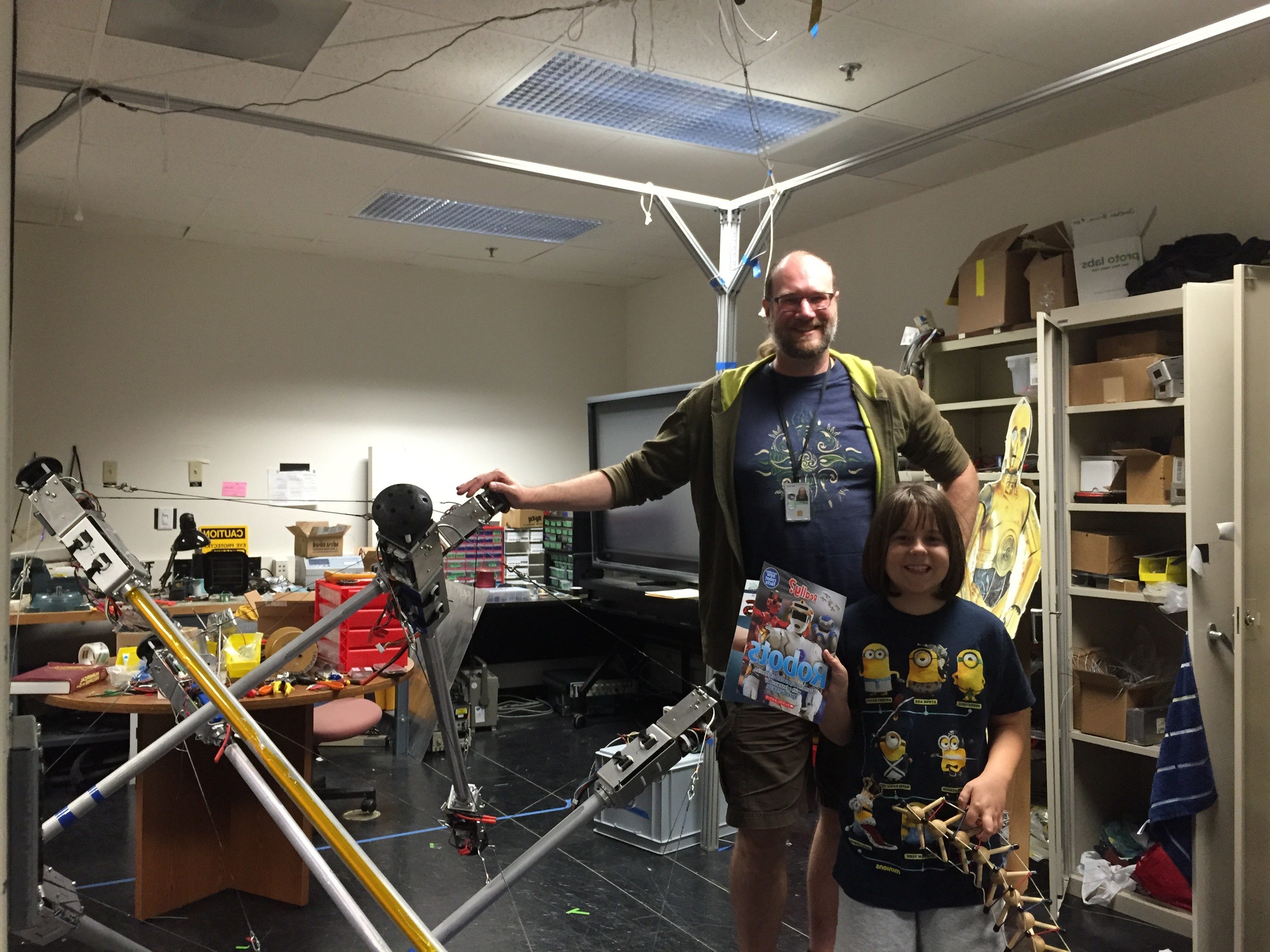
As soon as the book was published in May I had friends writing to me excited to see our ideas appearing in a Science Fiction novel by such a famous author! How Fun! So, I immediately ordered a copy of the book and read it. It was a thrilling, edge of the seat, ride, (admittedly our tensegrity robots only play a small role in the storyline, but it is fun that they show up!) and I can strongly encourage anyone to buy a copy and enjoy it!
And, while we are on the topic of PR and attention for our research, it is also fun to share the following article which was published in The American Scientist in July of 2015.
Stephen Piazza, “In-tense Robots — Motorized sculptures may represent our best chance for exploring the surfaces of other worlds.” The American Scientist.
And Finally, we recently gave a demonstration of our SUPERball tensegrity robot to Dava Newman, the Deputy Administrator of NASA. That was fun. She loved it.

You can also see more photos from her visit by our friends from the UC Berkeley BEST lab who participated in giving the Demo.